
2 Noise Mechanism of permanent Magnet synchronous Motor
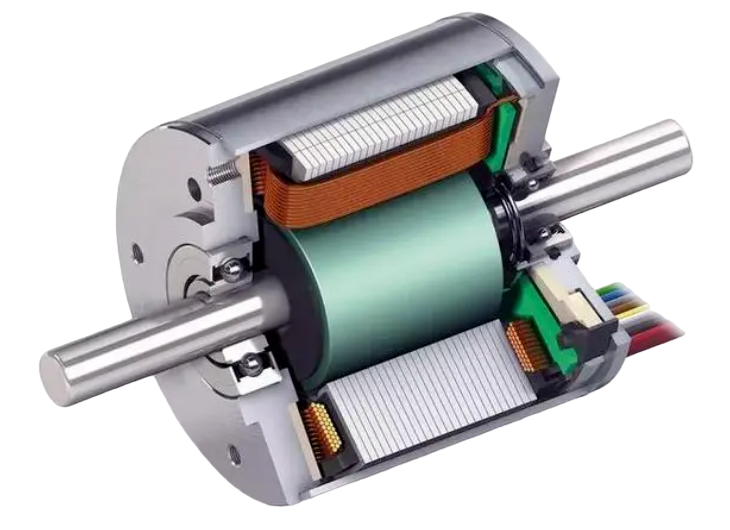
The three most common types of AC motors are permanent magnet synchronous motors (PMSMs), induction asynchronous motors, and synchronous reluctance motors. The stators of AC motors are basically the same, with the main difference being in the rotor. The stator mainly consists of an iron core and coils. The stator iron core is made by laminating silicon steel sheets; enameled wire is wound into coils, embedded in the iron core slots, and then insulated. The insulated iron core is fitted into the casing to obtain the stator. The stator windings are connected to an AC power source (usually three-phase AC, with the three-phase AC combined with coils at a spatial angle of 120°, forming a synthesized magnetic field that rotates like a uniformly strong magnetic field), creating a rotating magnetic field that drives the rotor to rotate.
The rotor of permanent magnet synchronous motor (PMSM) is made of iron core, magnetic steel and axis, which provides motor flux and is made of rare earth NdFeB by powder metallurgy, which has the greatest influence on the performance of the motor.
The rotor speed of the permanent magnet synchronous motor is synchronized with the speed of the stator magnetic field, that is, the alternating current frequency.
The stator winding is connected to alternating current to produce a rotating magnetic field, and the rotor permanent magnet magnetic field rotates along with the induction of the stator rotating magnetic field, and then outputs power.
Permanent magnet synchronous motor (PMSM) has the advantages of high power density, high operation efficiency, large and smooth torque, simple and compact structure and good speed regulation performance.
1) High power density
The NdFeB magnetic material of permanent magnet synchronous motor has excellent magnetic performance, and a strong eternal magnetic field can be constructed without increasing external energy after magnetization. There is no need for additional circuit excitation (that is, electrifying the conductor to generate a magnetic field).
Under the rated power, the power density of the permanent magnet synchronous motor with the same insulation material and heat dissipation condition is more than 2 times higher than that of the induction induction motor.
2) High operation efficiency
Because the rotor uses permanent magnet, the rotor of permanent magnet synchronous motor usually does not need electric excitation, which can reduce the related energy loss and has high efficiency.
3) Large torque and smooth
In the rated current range, increasing the current can quickly increase the motor torque.
In addition, the rotating magnetic field formed by three-phase AC in the stator is also relatively stable, so that the output torque ripple of the motor is small, especially under the condition of low speed and high torque (corresponding to the initial acceleration stage of the whole vehicle). Permanent magnet synchronous motor has outstanding advantages over asynchronous induction motor.
4) Good speed regulation performance
The relationship between electricity, magnetism and force of permanent magnet synchronous motor is simpler and easier to speed regulation and control than induction induction motor.
The state equation of induction motor is fourth-order, the equation of rotor and stator is coupled (the current in rotor is induced by the rotation of stator magnetic field), the state equation of permanent magnet synchronous motor is second-order, and the magnetic field of permanent magnet exists independently. The difficulty of speed regulation performance control is lower than that of induction induction motor.
5) The structure is simple and compact
The permanent magnet synchronous drive motor does not need to set up the excitation power supply structure and the excitation winding structure, which reduces the structural complexity, the motor structure is compact, and ensures the more reliable operation of the motor.
Permanent magnet synchronous motor noise includes motor controller noise, motor electromagnetic noise, mechanical noise, battery cooling noise and so on, which is mainly composed of motor electromagnetic noise and mechanical noise.
Among them, mechanical noise includes bearing noise, reducer howling, rotor eccentricity and so on, which are mainly produced by the work of mechanical parts.
The electromagnetic noise of the motor is mainly acted on the motor shell by torque fluctuation (cogging torque, ripple torque, time harmonic, etc.) and radial force wave (stator and rotor fundamental wave, stator and rotor high-order harmonics, switching frequency side frequency, time harmonic, etc.). Excite the modal response of the motor shell and cause resonance.
Electromagnetic noise is the unique and most important noise of drive motor. The magnetic field in the air gap changes the magnetic density and produces the alternating electromagnetic force, which acts on the stator tooth slot to produce the electromagnetic force (radial force and tangential force). The electromagnetic force is a time-related alternating force, which depends on the shape of the air gap, the shape of the tooth slot and so on.
The intensity of radial magnetic induction is greater than that of tangential magnetic induction, the radial electromagnetic force does not produce electromagnetic torque, and the radial force is greater than the tangential force.
The tangential electromagnetic force produces torque to drive the rotation of the rotor, and the main function is to maintain the establishment of the alternating magnetic field. The radial force wave excites the stator structure, and the stator structure vibrates to produce radiated noise, especially when the frequency of the radial force electromagnetic wave is consistent with the mode of the stator structure. The radiated noise is very obvious, and the noise generated by the electromagnetic force is a high-frequency whistling sound, which can be easily identified by human ears.
Cogging torque is one of the unique problems of permanent magnet motor. When the stator winding of permanent magnet motor is not electrified, the torque caused by the interaction between permanent magnet magnetic field and stator slotted reluctance is caused by the tangential force between permanent magnet and stator.
The rotor and stator of the permanent magnet motor without power supply tend to adjust to the minimum position of magnetoresistance, resulting in periodic torque.
The cogging torque has nothing to do with the armature current, is a function of the relative position of the stator and rotor, and is related to the design characteristics of the motor body (such as the structure and size of the pole slot and the magnetic pole, etc.).
The cogging torque will cause the torque ripple of the permanent magnet motor, which will lead to speed fluctuation and vibration and noise, especially when the frequency of the pulsating torque is consistent with the resonant frequency of the armature current. It will produce resonance, which is bound to amplify the vibration and noise of the cogging torque.
The ripple torque is the torque caused by the interaction between the stator EMF and the rotor electromagnetic characteristics when the permanent magnet motor is loaded.
When the stator and the rotor have the same harmonic induction intensity, the ripple torque is proportional to the harmonic order, so the high-order harmonic ripple torque is larger.
By using the rotor chute, the electromagnetic torque and induced electromotive force formed are similar to the average value of the same rotor guide bar uniformly distributed in a circumferential range, which can effectively weaken the harmonic EMF generated by the tooth harmonic magnetic field. That will weaken the additional torque caused by these harmonic magnetic fields and reduce electromagnetic vibration and noise.
Although the rotor skew slot will also reduce the fundamental EMF induced by the rotor, the general selection of the inclined slot is much smaller than the pole distance, so it has little impact on the basic performance of the motor. Therefore, the rotor inclined slot is widely used in small and medium-sized cast aluminum rotor induction motors.
