
CAN (Controller Area Network) is a serial communication protocol bus for real-time applications. It can use twisted pair to transmit signals. It is one of the most widely used field buses in the world.
The CAN protocol is used to communicate between different components in an automobile to replace the expensive and bulky distribution harness.
In the application of CAN bus, it is generally recommended to use shielded twisted pair for networking and wiring. This paper will explain in detail why the CAN bus should adopt the layout of twisted pair.
Brief introduction of twisted pair
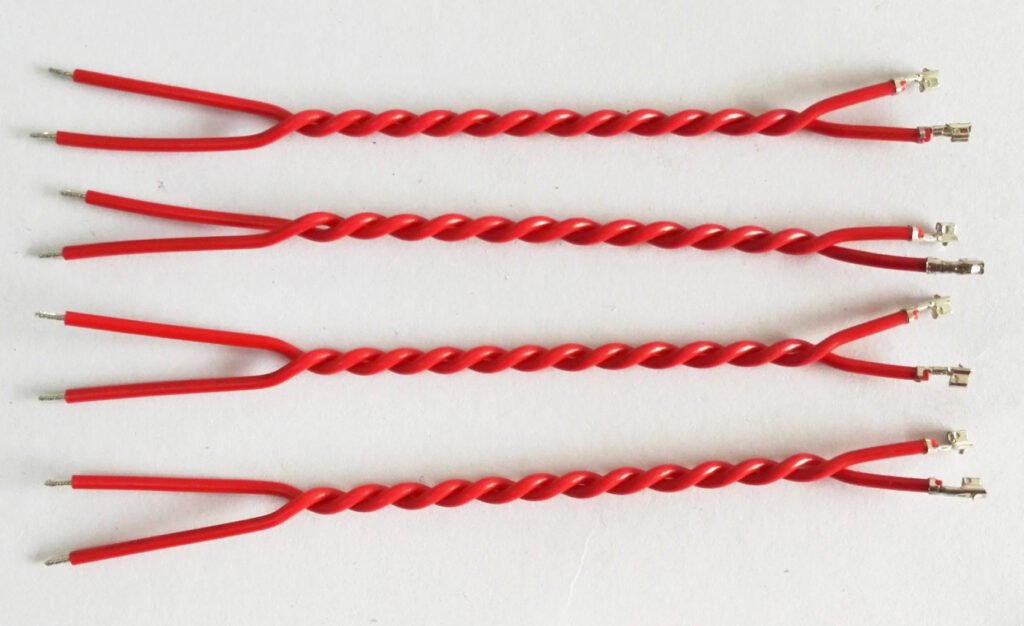
Twisted pair is a kind of general wiring made of two insulated wires which are wound together according to certain specifications.
The main function of twisted pair is to prevent external electromagnetic interference and reduce the external interference of its own signal.
(that is, it can not only prevent others from interfering with themselves, but also reduce their own interference with others. )
HH-665 Fully-automatic Terminal Crimping, Wire Stranding and Tinning Machine
HH-J1/J2/J3/J5 Wire Stranding Machine
Twisting a pair of insulated metal wires together can not only resist some electromagnetic interference from the outside, but also reduce the mutual interference between multiple pairs of stranded wires. The principle is that two insulated wires are twisted together. The interference signal acting on the two intertwined wires is consistent (this interference signal is called common-mode signal).
The common mode signal can be eliminated in the differential circuit of the received signal, thus the useful signal (differential mode signal) can be extracted.
The function of the twisted pair is to make the noise generated by external interference on the two wires same (in the professional field, the useless signal is called noise), so that the subsequent differential circuit extracts the useful signal, the differential circuit is a subtraction circuit, the two input signals (common-mode signal) cancel each other out (m-n), and the inverted signal is equivalent to x-(- y) and is enhanced.
Theoretically, in twisted pair and differential circuits, m=n,x=y,the interference signal is completely eliminated and the useful signal is doubled, but there are some differences in actual operation.

In a cable casing, different wire pairs have different twist lengths. Generally speaking, the twist length is within 38.1mm~140mm, twisted counterclockwise, and the twist length of adjacent wire pairs is less than 12.7mm.
The length of a twisted pair period is called pitch. The smaller the pitch (the denser the twisted wire), the stronger the anti-interference ability.
Common twisted pair and its advantages
The common twisted pair wires are Category 3, Category 5 and Super Category 5, as well as the latest Category 6. The former is thin and the latter is thick. The models are as follows:
- Category 1:
It is mainly used for voice transmission (a kind of standard is mainly used for telephone cables before the early 1980s), which is different from data transmission.
- Category 2:
The transmission frequency is 1MHZ, which is used for voice transmission and data transmission with the highest transmission rate 4Mbps. It is common in old token networks that use the 4MBPS specification token passing protocol.
- Category 3:
Refers to the cable currently specified in the ANSI and EIA/TIA568 standards. The transmission frequency of the cable is 16MHz, which is used for voice transmission and data transmission with a maximum transmission rate of 10Mbps. It is mainly used for 10BASE-T.
- Category 4:
The transmission frequency of this kind of cable is 20MHz, and the data transmission for voice transmission and maximum transmission rate 16Mbps. It is mainly used for token-based LAN and 10BASE-T/100BASE-T.
- Category 5:
This kind of cable increases the winding density and covers a high-quality insulating material with a transmission rate of 100MHz. It is used for voice transmission and data transmission with the highest transmission rate of 10Mbps, mainly for 100BASE-T and 10BASE-T networks.
This is the most commonly used Ethernet cable.
- Category 5e:
Category 5e has the advantages of low attenuation, low crosstalk, higher ratio of attenuation to crosstalk (ACR) and signal to noise ratio (Structural Return Loss), and smaller delay error, so the performance is greatly improved.
Category 5e cable is mainly used for Gigabit Ethernet (1000Mbps).
- Category 6:
The transmission frequency of this kind of cable is 1MHz~250MHz, and the comprehensive attenuation crosstalk ratio (PS-ACR) of the Category 6 of wiring system should have a large margin in 200MHz, which provides 2 times the bandwidth of more than Category 5.
The transmission performance of Category 6 of cabling is much higher than that of more than Category 5 standards, and it is most suitable for applications where the transmission rate is higher than 1Gbps.
An important difference between category 6 and category 5 is that it improves the performance of crosstalk and echo loss. For the new generation of full-duplex high-speed network applications, excellent echo loss performance is very important.
The basic link model is cancelled in the Category 6 of standards, and the cabling standard adopts a star topology, and the required wiring distance is that the length of the permanent link can not exceed 90m and the channel length can not exceed 100m.
At present, twisted pair can be divided into unshielded twisted pair (UTP=UNSHILDED TWISTED PAIR) and shielded twisted pair (STP=SHIELDED TWISTED PAIR).
The outer layer of shielded twisted pair cable is coated with aluminum film to reduce radiation, but it can not completely eliminate radiation. The price of shielded twisted pair cable is relatively high, and it is more difficult to install than unshielded twisted pair cable.
Combination of CAN and twisted pair
When CAN is applied to new energy vehicles, it means that it has to work in a serious electromagnetic environment, so how to resist interference is the most concerned topic for engineers.
When the CAN bus uses twisted pair, it can solve these interference problems very well, and the CAN interface adopts the differential signal transmission mode.
Differential signal transmission is a method of information transmission using two complementary electrical signals.
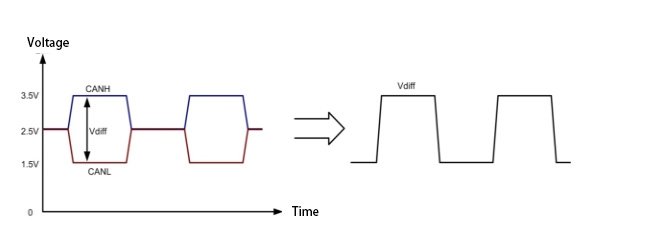
Take high-speed CAN as an example, different logic states are transmitted through two signal lines CANH and CANL, and the receiving circuit only identifies the signal difference between the two signal lines.
Ideally, the waveform of the CAN bus is shown in the following figure:
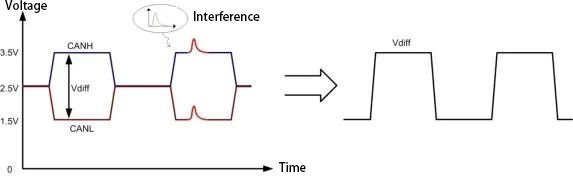
The interference signal generally exists in the form of common mode, when the bus is interfered, the two buses will be affected at the same time, but the differential voltage will not be affected, as shown in following figure.
Compared with the single signal transmission mode, the differential signal transmission mode has better anti-jamming ability.
Of course, the use of differential transmission can not rest easy.
CAN bus is often used for long-distance communication. With the increase of cable length, all kinds of interference are coupled to the bus through the cable, which greatly increases the probability of external interference to the bus communication. If the cable is selected and used improperly, it is very likely to cause abnormal communication.
For CAN bus applications, twisted pair is generally recommended.
Special “twisted pair” CAN
In addition to a two-wire CAN, there is a single-wire CAN, which can reduce one transmission line, but requires good common ground characteristics between nodes (equivalent to the second signal line).
The signal anti-jamming ability of single-wire CAN is relatively weak, so it is necessary to increase the signal amplitude to increase the signal-to-noise ratio in the design, which will increase its own radiation capacity, so it is necessary to reduce its signal transmission rate to meet the requirements of electromagnetic compatibility.
To sum up, the single-wire CAN is only suitable for low-speed body electronic units, comfort and entertainment control.
Due to the low signal speed, the low-speed CAN bus can still work in single-wire mode when a signal line fails.
